
Robot Rubbish Collector
This is a combination idea of two items, the gripper and skip, to make a rubbish collector robot which uses the gripper to hold an object, pick it up and drop it into the skip, and then when the robot is in a suitable position, tip the skip to unload.



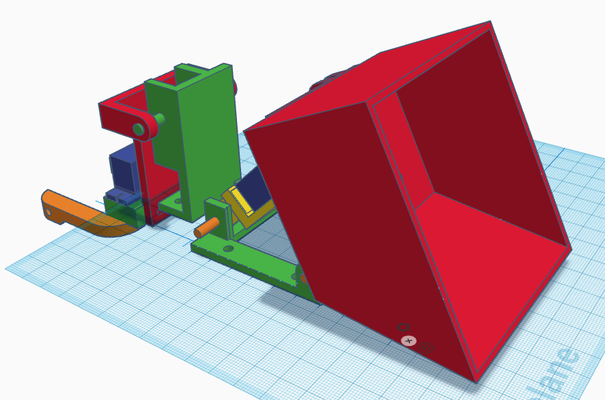





The design is held on TinkerCAD here as Rubbish Garbage Collection Robot using SG90 servos